VOUT+=k1(VIN)+k2(VIN)
2
+k3(VIN)
3
+...等式1
VOUT–=k1(–VIN)+k2(–VIN)
2
+k3(–VIN)
3
+...等式2
VOUT+–VOUT–=2k1(VIN)+2k3(VIN)
3
+...等式3
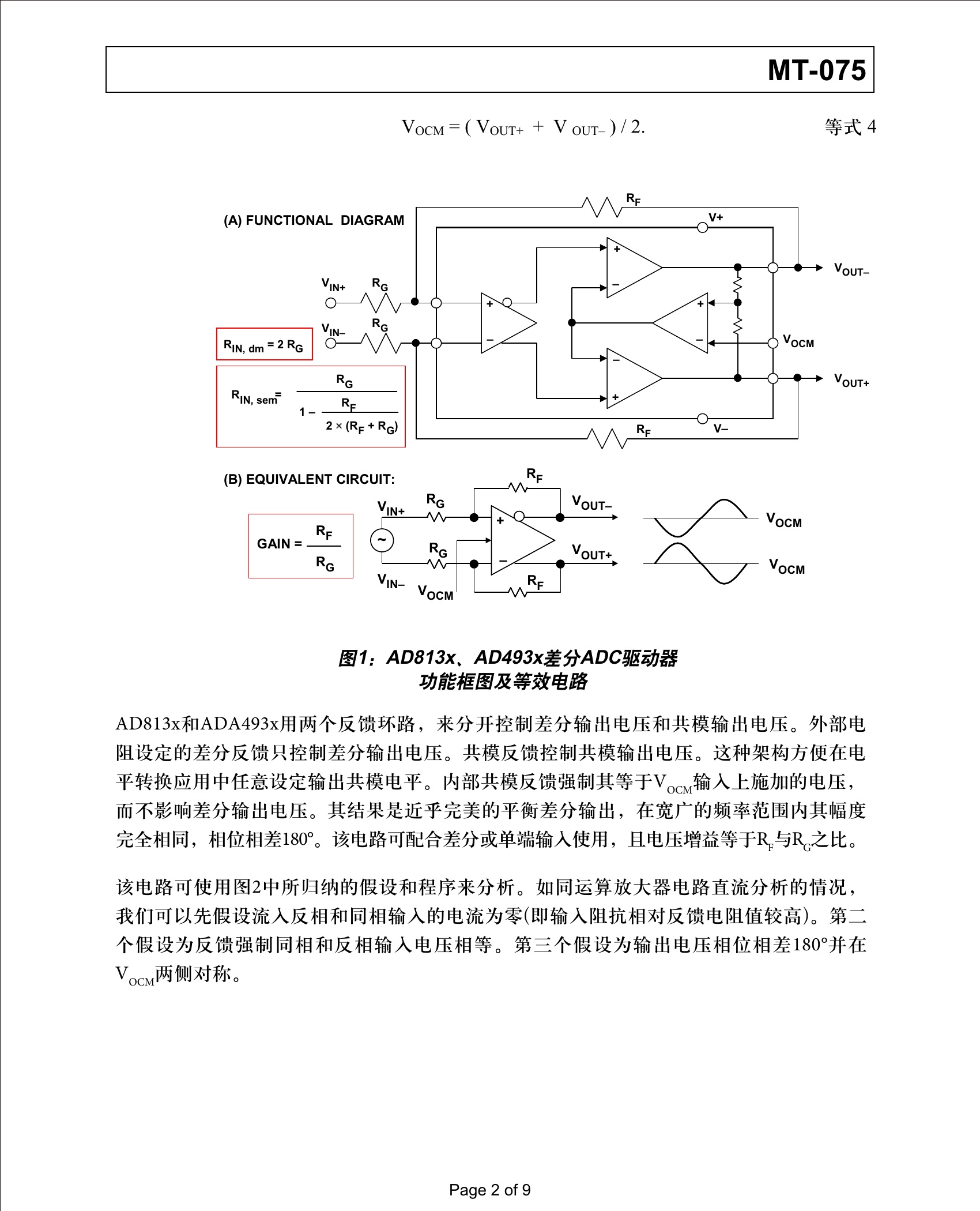
差分驱动器基础知识
目前许多高性能ADC设计均采用差分输入。全差分ADC设计具有共模抑制性能出色、二
阶失真产物较少、直流调整算法简单的优点。尽管可以单端驱动,但全差分驱动器通常可
以优化整体性能。
差分设计固有的低二阶失真产物如下所示。失真产物可以通过将电路传递函数表达为幂级
数来建立模型。
进行输出一般扩展并假设放大器匹配,我们得到:
采用差分输出:MT-075指南高速ADC用差分驱动器概述差分驱动器基础知识目前许多高性能ADC设计均采用差分输入。全差分ADC设计具有共模抑制性能出色、二阶失真产物较少、直流调整算法简单的优点。尽管可以单端驱动,但全差分驱动器通常可以优化整体性能。差分设计固有的低二阶失真产物如下所示。失真产物可以通过将电路传递函数表达为幂级数来建立模型。进行输出一般扩展并假设放大器匹配,我们得到:VOUT+=k1(VIN)+k2(VIN)2+k3(VIN)3+...等式1VOUT
暂无评论