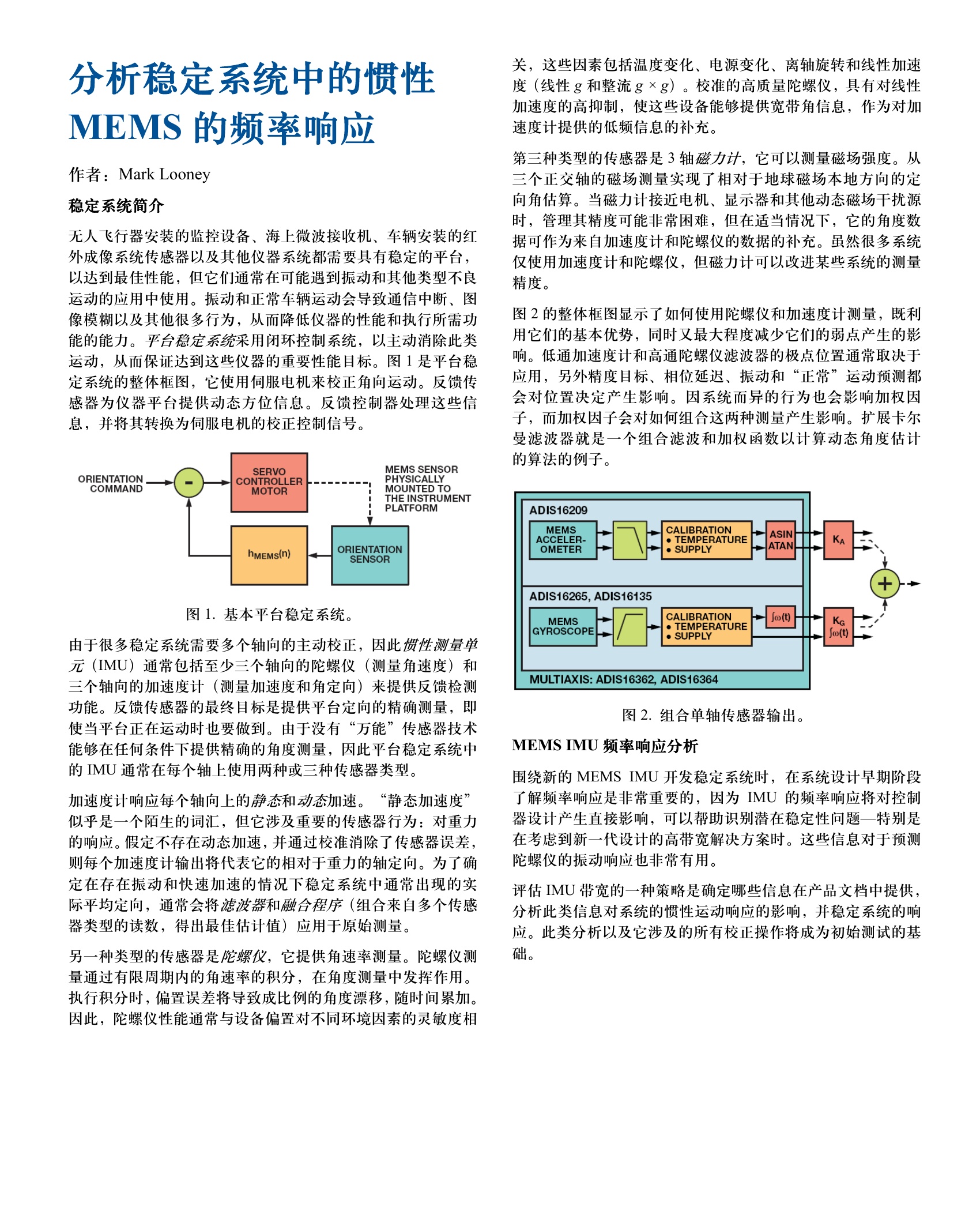
无人飞行器安装的监控设备、海上微波接收机、车辆安装的红外成像系统传感器以及其他仪器系统都需要具有稳定的平台,以达到最佳性能,但它们通常在可能遇到振动和其他类型不良运动的应用中使用。振动和正常车辆运动会导致通信中断、图像模糊以及其他很多行为,从而降低仪器的性能和执行所需功能的能力。平台稳定系统采用闭环控制系统,以主动消除此类运动,从而保证达到这些仪器的重要性能目标。图1是平台稳定系统的整体框图,它使用伺服电机来校正角向运动。反馈传感器为仪器平台提供动态方位信息。反馈控制器处理这些信息,并将其转换为伺服电机的校正控制信号。关,这些因素包括温度变化、电源变化、离轴旋转和线性加速分析稳定系统中的惯性度(线性g和整流g×g)。校准的高质量陀螺仪,具有对线性加速度的高抑制,使这些设备能够提供宽带角信息,作为对加MEMS的频率响应速度计提供的低频信息的补充。第三种类型的传感器是3轴磁力计,它可以测量磁场强度。从作者:MarkLooney三个正交轴的磁场测量实现了相对于地球磁场本地方向的定稳定系统简介向角估算。当磁力计接近电机、显示器和其他动态磁场干扰源时,管理其精度可能非常困难,但在适当情况下,它的角度数无人飞行器安装的监控设备、海上微波接收机、车辆安装的红据可作为来自加速度计和陀螺仪的数据的补充。虽然很多系统外成像系统传感器以及其他仪器系统都需要具有稳定的平台,仅使用加速度计和陀螺仪,但磁力计可以改进某些系统的测量以达到最佳性能,但它们通常
暂无评论