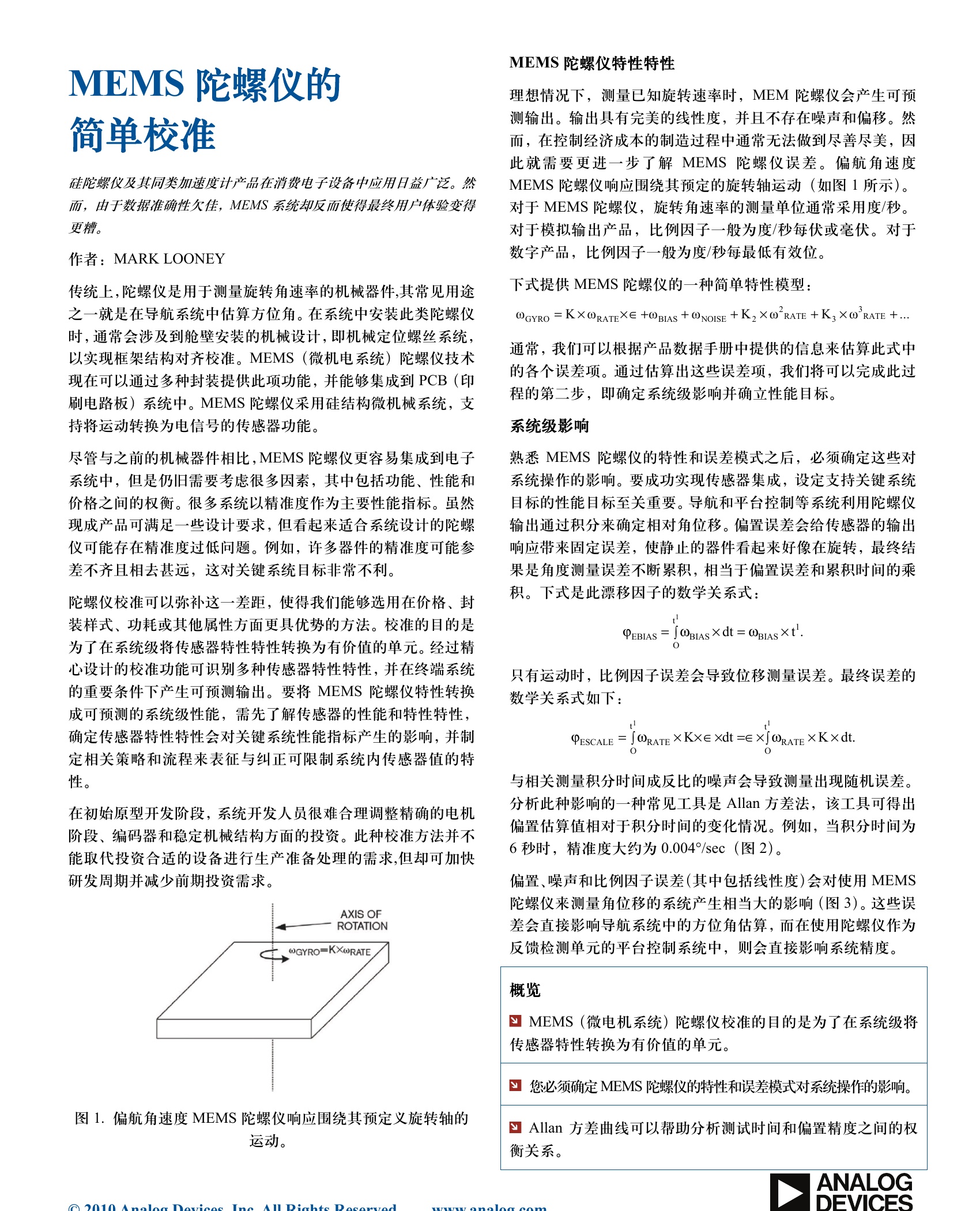
传统上,陀螺仪是用于测量旋转角速率的机械器件,其常见用途之一就是在导航系统中估算方位角。在系统中安装此类陀螺仪时,通常会涉及到舱壁安装的机械设计,即机械定位螺丝系统,以实现框架结构对齐校准。MEMS(微机电系统)陀螺仪技术现在可以通过多种封装提供此项功能,并能够集成到PCB(印刷电路板)系统中。MEMS陀螺仪采用硅结构微机械系统,支持将运动转换为电信号的传感器功能。MEMS陀螺仪特性特性MEMS陀螺仪的理想情况下,测量已知旋转速率时,MEM陀螺仪会产生可预测输出。输出具有完美的线性度,并且不存在噪声和偏移。然简单校准而,在控制经济成本的制造过程中通常无法做到尽善尽美,因此就需要更进一步了解MEMS陀螺仪误差。偏航角速度硅陀螺仪及其同类加速度计产品在消费电子设备中应用日益广泛。然MEMS陀螺仪响应围绕其预定的旋转轴运动(如图1所示)。而,由于数据准确性欠佳,MEMS系统却反而使得最终用户体验变得对于MEMS陀螺仪,旋转角速率的测量单位通常采用度/秒。更糟。对于模拟输出产品,比例因子一般为度/秒每伏或毫伏。对于作者:MARKLOONEY数字产品,比例因子一般为度/秒每最低有效位。传统上,陀螺仪是用于测量旋转角速率的机械器件,其常见用途下式提供MEMS陀螺仪的一种简单特性模型:之一就

暂无评论