Continuousprocesseshavebeencontrolledby
feedbackloopssincethelate1700’s.In1788,James
Wattusedaflyballgovernoronhissteamengineto
regulateitsspeed.TheTaylorInstrumentCompany
implementedthefirstfullyfunctionalProportional,
IntegralandDerivative(PID)controllerin1940.
Althoughfeedbackcontrolhascomealongwaysince
JamesWatt,thebasicapproachandsystemelements
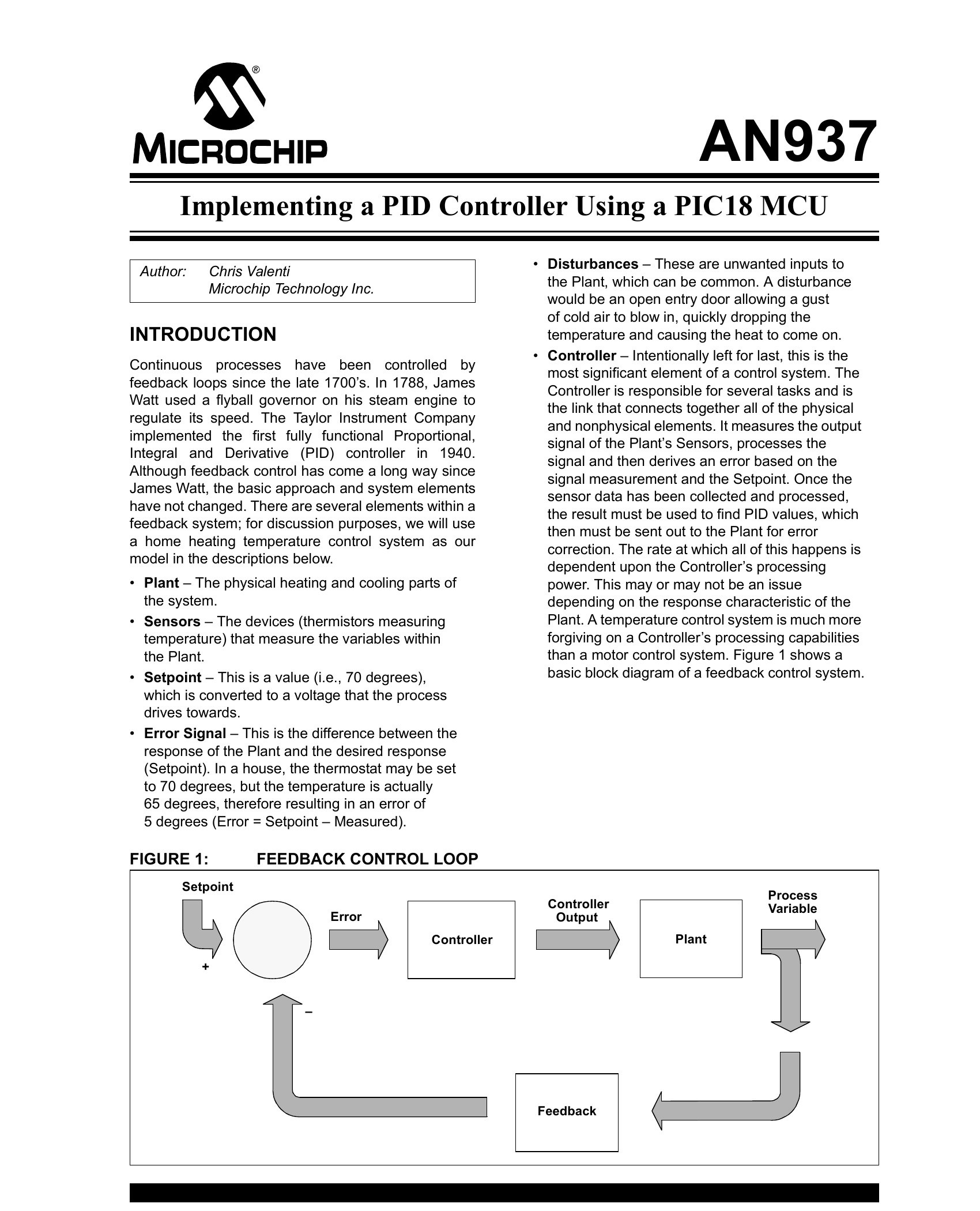
havenotchanged.Thereareseveralelementswithina
feedbacksystem;fordiscussionpurposes,wewilluse
ahomeheatingtemperaturecontrolsystemasour
modelinthedescriptionsbelow.
•Plant–Thephysicalheatingandcoolingpartsof
thesystem.
•Sensors–Thedevices(thermistorsmeasuring
temperature)thatmeasurethevariableswithin
thePlant.
•Setpoint–Thisisavalue(i.e.,70degrees),
whichisconvertedtoavoltagethattheprocess
drivestowards.
•ErrorSignal–Thisisthedifferencebetweenthe
responseofthePlantandthedesiredresponse
(Setpoint).Inahouse,thethermostatmaybeset
to70degrees,butthetemperatureisactually
65degrees,thereforeresultinginanerrorof
5degrees(Error=Setpoint–Measured).AN937ImplementingaPIDControllerUsingaPIC18MCUAuthor:ChrisValentiDisturbances
暂无评论