Objectrangingisessentialinmanytypesofsystems.
Oneofthemostpopularrangingtechniquesis
ultrasonicranging.Ultrasonicrangingisusedinawide
varietyofapplicationsincluding:
•Autofocuscameras
•Motiondetection
•Roboticsguidance
•Proximitysensing
•Objectranging
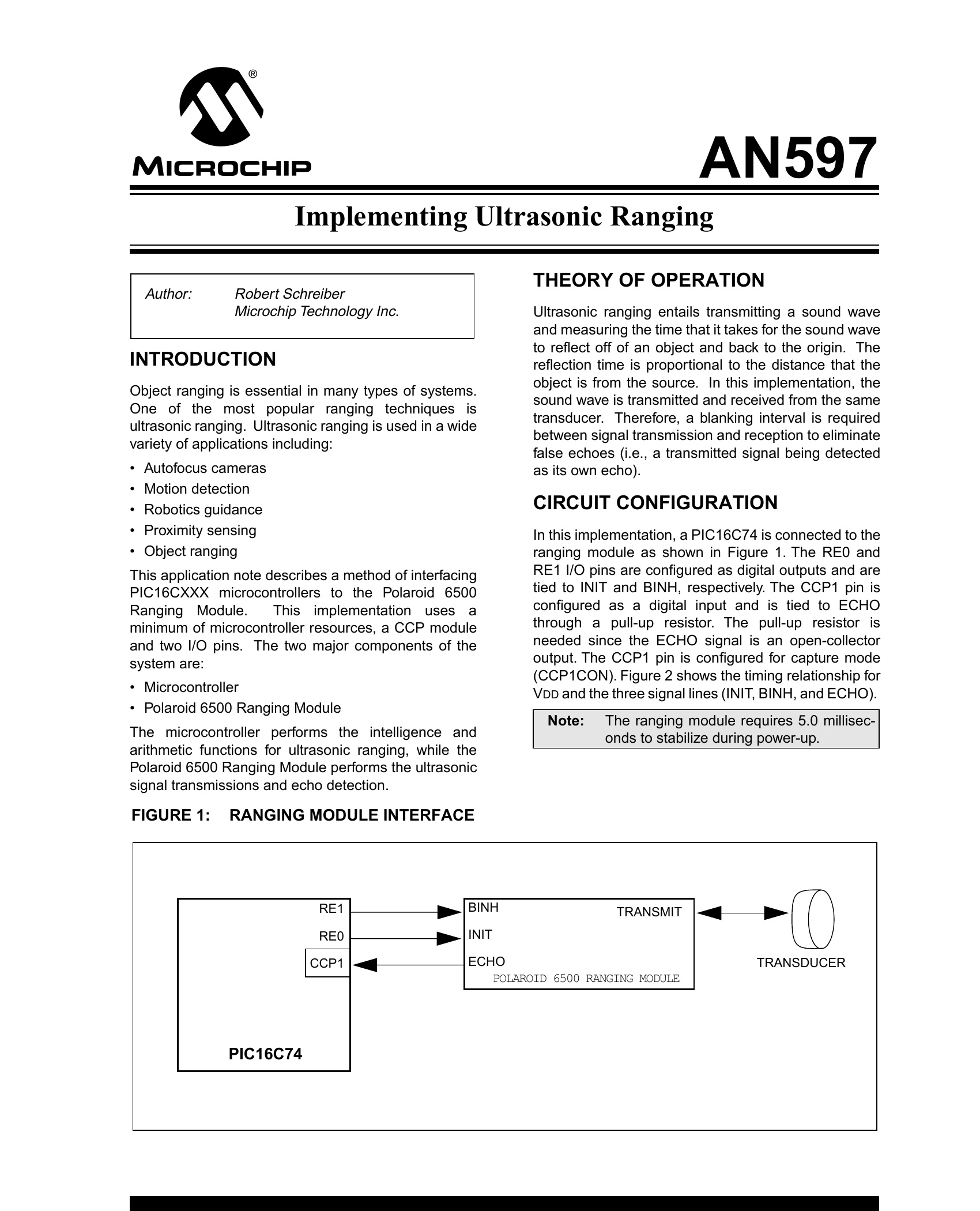
Thisapplicationnotedescribesamethodofinterfacing
PIC16CXXXmicrocontrollerstothePolaroid6500
RangingModule.Thisimplementationusesa
minimumofmicrocontrollerresources,aCCPmodule
andtwoI/Opins.Thetwomajorcomponentsofthe
systemare:
•Microcontroller
•Polaroid6500RangingModule
Themicrocontrollerperformstheintelligenceand
arithmeticfunctionsforultrasonicranging,whilethe
Polaroid6500RangingModuleperformstheultrasonic
signaltransmissionsandechodetection.MImplementingUltrasonicRangingAN597THEORYOFOPERATIONAuthor:RobertSchreiberMicrochipTechnologyInc.Ultrasonicrangingentailstransmittingasoundwaveandmeasuringthetimethatittakesforthesoundwavetoreectoffofanobjectandbacktotheorigin.TheINTRODUCTIONreectiontimeisproportionaltothedistancethatthe
暂无评论