Thepurposeofthisapplicationnoteistodescribehow
aPIC16F684canbeusedtoimplementapositional
Proportional-Integral-Derivative(PID)feedbackcontrol
inaninherentlyunstablesystem.Aninverted
pendulumisusedtodemonstratethistypeofcontrol.
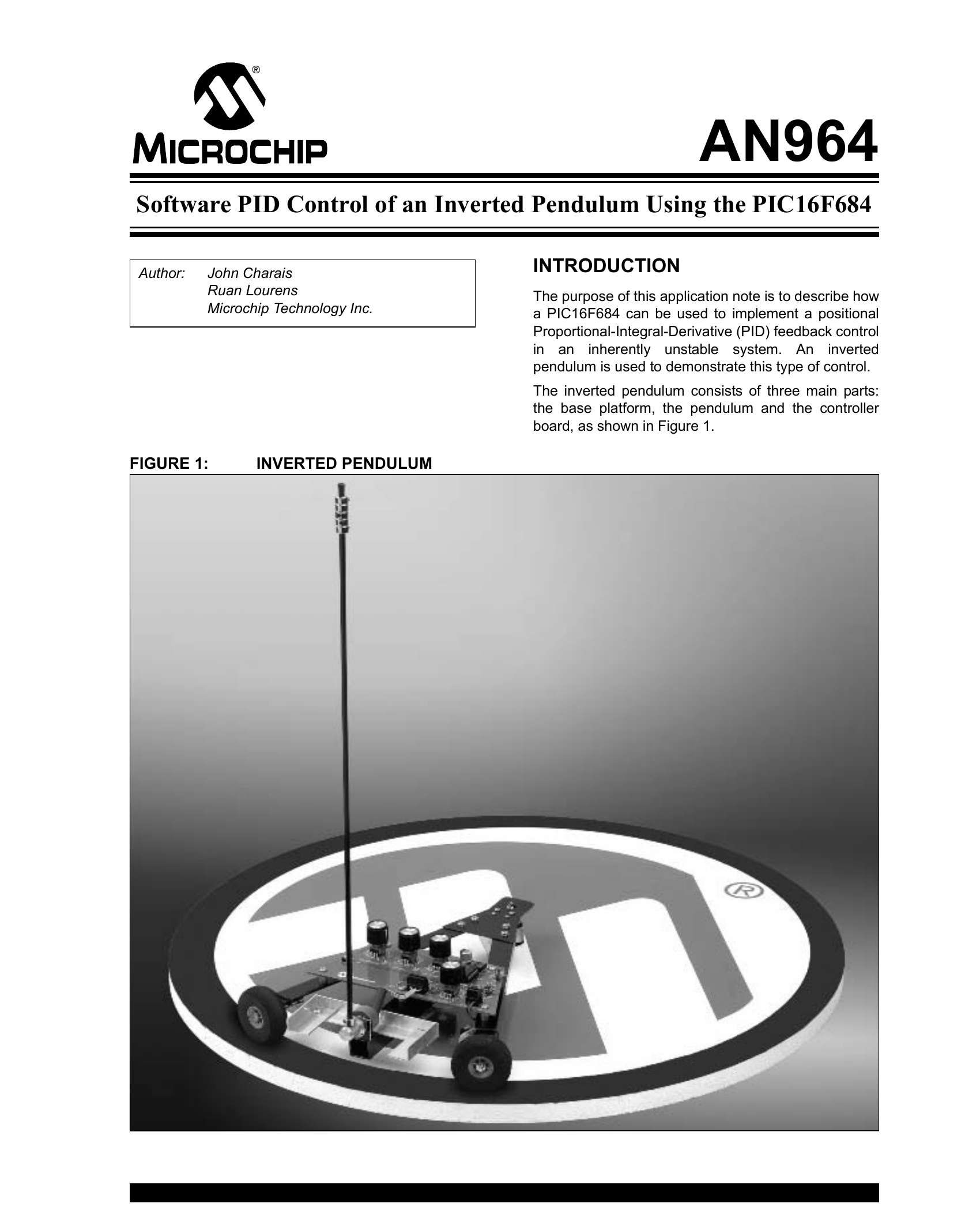
Theinvertedpendulumconsistsofthreemainparts:
thebaseplatform,thependulumandthecontroller
board,asshowninFigure1.AN964SoftwarePIDControlofanInvertedPendulumUsingthePIC16F684Author:JohnCharaisINTRODUCTIONRuanLourensThepurposeofthisapplicationnoteistodescribehowMicrochipTechnologyInc.aPIC16F684canbeusedtoimplementapositionalProportional-Integral-Derivative(PID)feedbackcontrolinaninherentlyunstablesystem.Aninvertedpendulumisusedtodemonstratethistypeofcontrol.Theinvertedpendulumconsistsofthreemainparts:thebaseplatf

暂无评论