CAN是一种差分信号标准,广泛用于汽车、工业和仪器仪表行业。
它用于不同系统之间的串行通信,这些系统常常是经长距离连接
到不同的电源系统。由于环境限制,常常使用电流隔离来中断接
地环路或提供物理安全性。
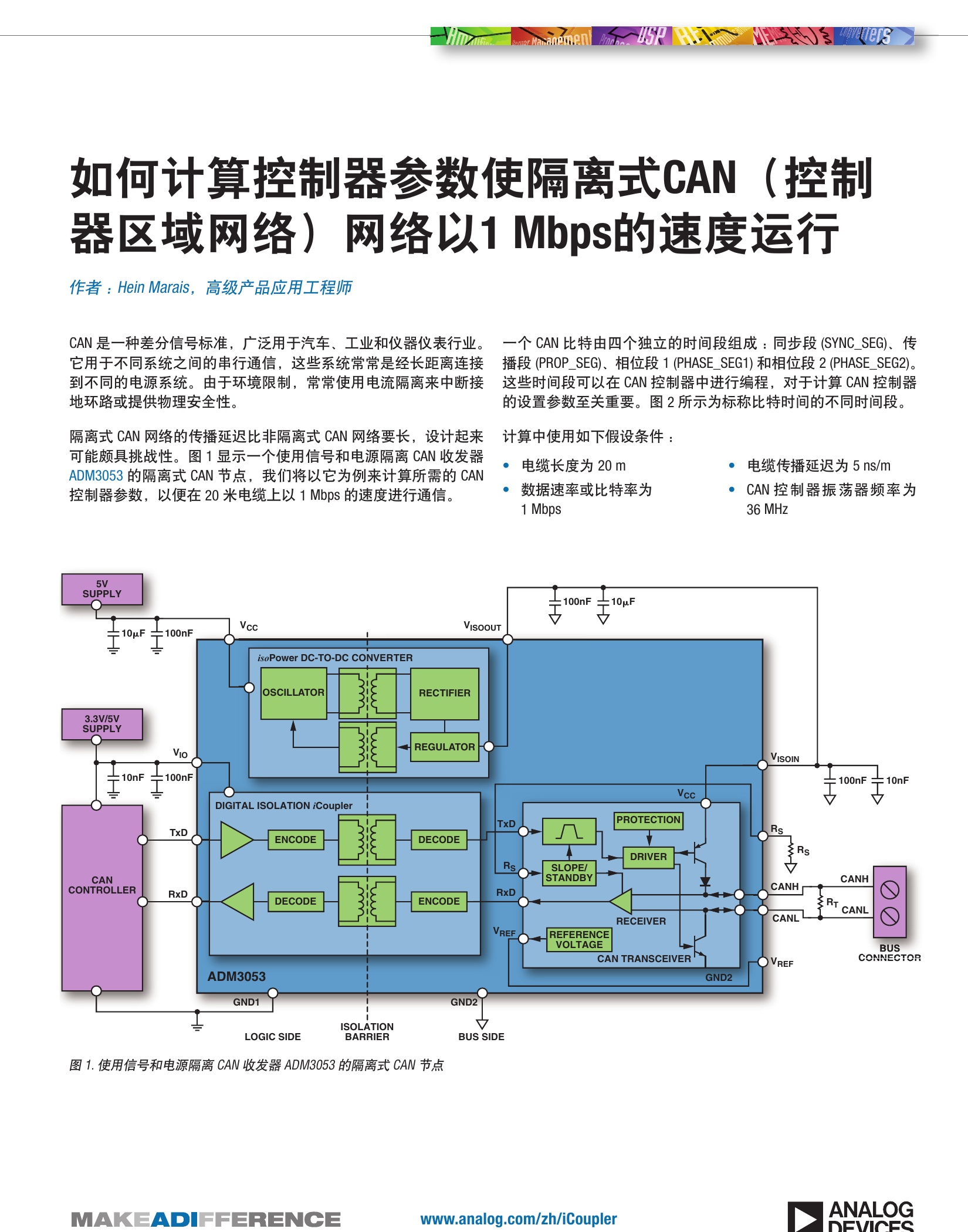
隔离式 CAN 网络的传播延迟比非隔离式 CAN 网络要长,设计起来
可能颇具挑战性。图 1 显示一个使用信号和电源隔离 CAN 收发器
ADM3053 的隔离式 CAN 节点,我们将以它为例来计算所需的 CAN
控制器参数,以便在 20 米电缆上以 1 Mbps 的速度进行通信。
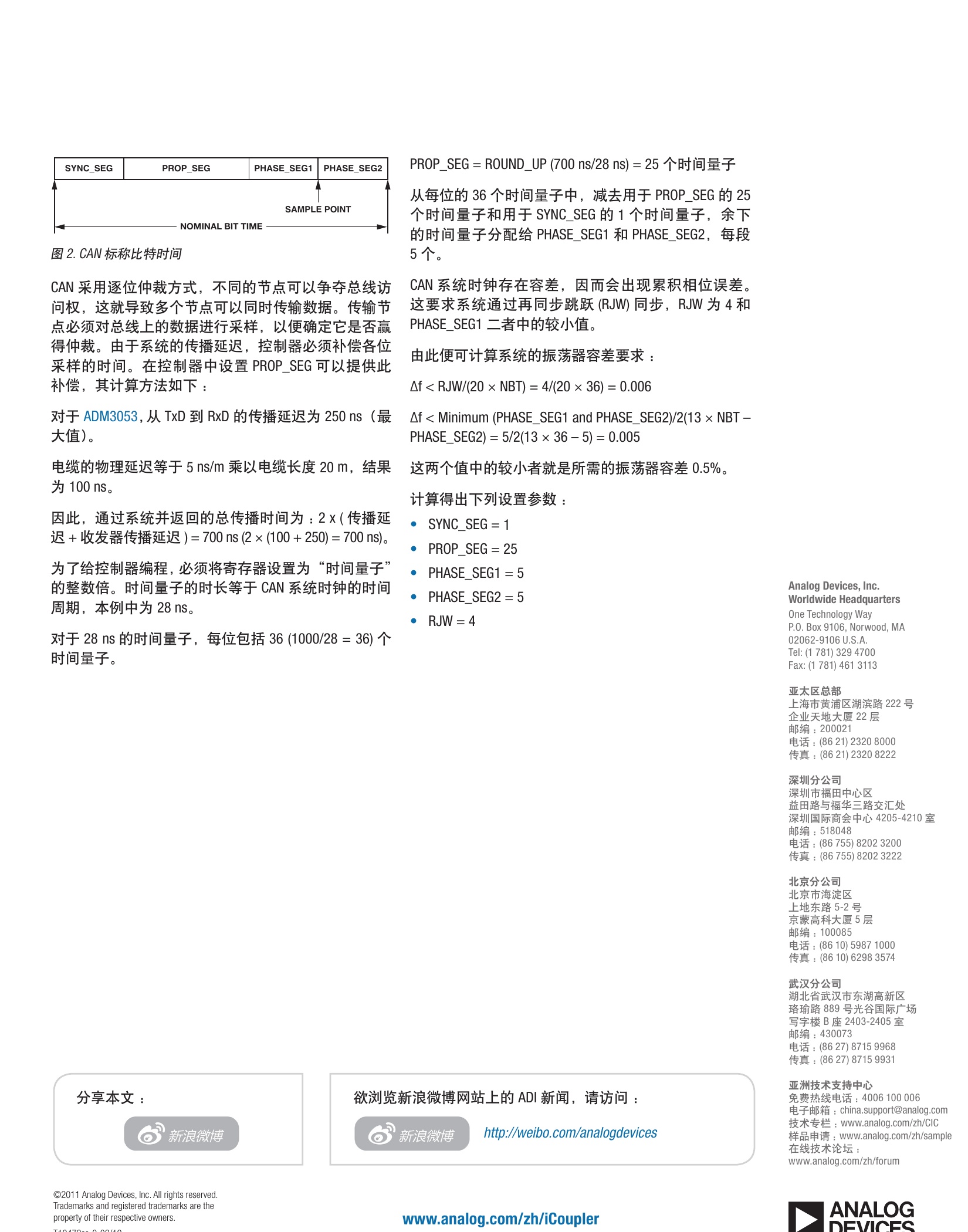
一个 CAN 比特由四个独立的时间段组成 :同步段 (SYNC_SEG)、传
播段(PROP_SEG)、相位段 1 (PHASE_SEG1)和相位段 2 (PHASE_SEG2)。
这些时间段可以在 CAN 控制器中进行编程,对于计算 CAN 控制器
的设置参数至关重要。图2所示为标称比特时间的不同时间段。
计算中使用如下假设条件:
作者:Hein Marais,高级产品应用工程师
电缆长度为 20 m•
数据速率或比特率为•
1 Mbps
电缆传播延迟为 5 ns/m•
CAN 控制器振荡器频率为 •
36 MHz如何计算控制器参数使隔离式CAN(控制器区域网络)网络以1 Mbps的速度运行作者 :Hein Marais,高级产品应用工程师CAN 是一种差分信号标准,广泛用于汽车、工业和仪器仪表行业。一个 CAN 比特由四个独立的时间段组成 : 同步段 (SYNC_SEG)、传它用于不同系统之间的串行通信,这些系统常常是经长距离连接播段 (PROP_SEG)、相位段 1 (PHASE_SEG1) 和相位段 2 (PHASE_SEG2)。到不同的电源系统。由于环境限制,常常使用电流隔离来中断接这些时间段可以在 CAN 控制器中进行编程,对于计算 CAN 控制器地环路或提供物理安全性。的设置参数至关重要。图 2 所示为标称比特时间的不同时间段。隔离式 CAN 网络的传播延迟比非隔离式 CAN 网络要长,设计起来计算中使用如下假设条件 :可能颇具挑战性。图 1 显示一个使用信号和电源隔离 CAN 收发器 电缆长度为 20 m 电缆传播延迟为 5 ns/mADM3053 的隔离式 CAN 节点,我们将以它为例来计算所需的 CAN控制器参数,以便在 20 米电缆上以 1 Mbps 的速度进行通信。 数据速率或比特率为
暂无评论