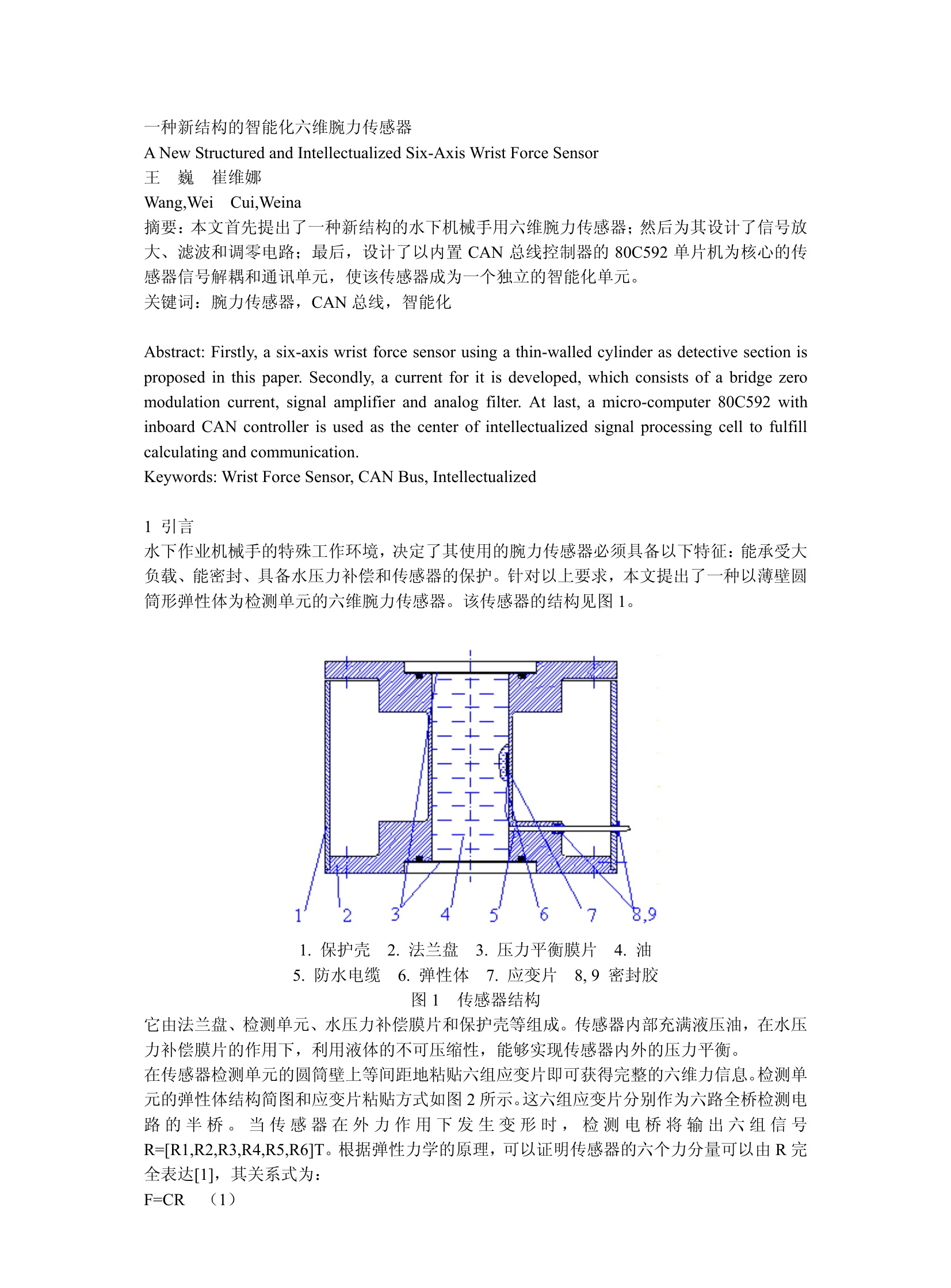
电路设计方案一种新结构的智能化六维腕力传感器A New Structured and Intellectualized Six-Axis Wrist Force Sensor王巍崔维娜Wang,Wei Cui,Weina摘要:本文首先提出了一种新结构的水下机械手用六维腕力传感器;然后为其设计了信号放大、滤波和调零电路;最后,设计了以内置CAN总线控制器的80C592单片机为核心的传感器信号解耦和通讯单元,使该传感器成为一个独立的智能化单元。关键词:腕力传感器,CAN总线,智能化Abstract:Firstly,a six-axis wrist force sensor using a thin-walled cylinder as detective section isproposed in this paper.Secondly,a current for it is developed,which consists of a bridge zeromodulation current,signal amplifier and analog filter.At last,a micro-computer80C592withinboard CANcontroller is used as the center of intellectualized signal processing cell to fulfillcalculating and communication.Keywords:Wrist Force Sensor,CANBus,Intellectualized1引言水下作业机械手的特殊工作环境,决定了其使用的腕力传感器必须具备以下特征:能承受大负载、能密封、具备水压力补偿和传感

暂无评论