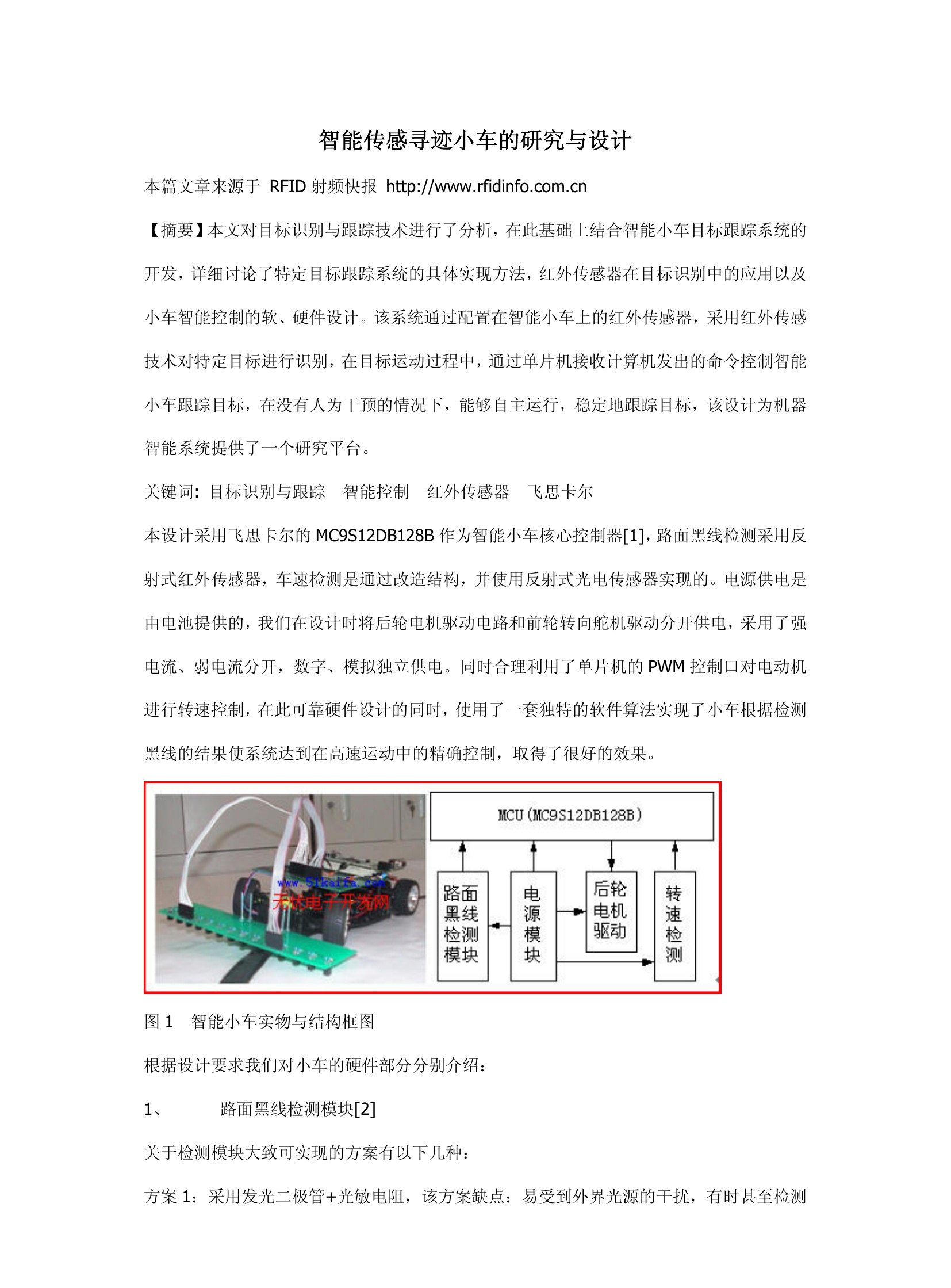
摘要:本文对目标识别与跟踪技术进行了分析,在此基础上结合智能小车目标跟踪系统的开发,详细讨论了特定目标跟踪系统的具体实现方法,红外传感器在目标识别中的应用以及小车智能控制的软、硬件设计。该系统通过配置在智能小车上的红外传感器,采用红外传感技术对特定目标进行识别,在目标运动过程中,通过单片机接收计算机发出的命令控制智能小车跟踪目标,在没有人为干预的情况下,能够自主运行,稳定地跟踪目标,该设计为机器智能系统提供了一个研究平台。
关键词: 目标识别与跟踪 智能控制 红外传感器 飞思卡尔
暂无评论
亲测,可寻迹,只要两个反射是光电传感,适合初学者,其中还有llcd1602的显示功能,本人技术能力有限此程序显示只能显示固定的数,可显示一位小数。
stm32循迹小车资源,两个循迹模块就可以简单做一个循迹小车了,亲测可用。 最小系统板可能没有c8c9,程序改一下就行了,改成b8b9就可以了。
小车的源码,寻迹小车 FollowMe 项目。
Arduino寻迹小车项目是一个基于Arduino控制器的智能车辆设计,让小车沿着特定路径自主行驶。这个项目的核心是利用传感器技术来检测路径,并通过Arduino的编程能力来控制小车的运动,确保它能准
本设计主要有三个模块,包括信号检测模块、主控模块、电机驱动模块。信号检测模块采用灰度传感器和超声波,用以对有无障碍与跟随黑线进行检测。主控电路采用STM32单片机为控制芯片。电机驱动模块采用意法半导体
摘要:本寻迹小车是以有机玻璃为车架,ATmage32L单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。系统由mage32通过IO口控制小车的前进后退以及转向。寻迹由RPR220型
智能小车寻迹入库程序+C.pdf这是一个小车巡线入库的程序,在安装路面传感器安装于距离地面1CM的位置。对于不同的地面环境可以适当修改程序中电机的速度
一种基于avr单片机的小车寻迹系统。该系统采用两组高灵敏度的光电对管,对路面黑色轨迹进行检测,并利用单片机产生PWM波,控制小车速度。测试结果表明,该系统能够平稳跟踪给定的路径。
51单片机控制智能小车的一个文档 这里有详细的说明文件
针对51单片机智能小车寻光 寻迹 电机驱动原理分析
暂无评论