暂无评论
水下机器人-机械手系统的动力学分析,常宗瑜,陈秉聪,随着我国海洋开发事业的发展,水下机器人操作手在水下勘探、水下采矿、海洋石油工程等领域发挥着越来越重要的作用。本文提出了一
可着陆自治水下机器人机械结构设计,张宏伟,王树新,为了有效节省能源,执行长时间的海洋测量任务,本文提出了一种可着陆自治水下机器人(可着陆AUV),并对其机械结构进行了设计。可
当前,大多数控制方法对于受到不可测量的谐波干扰影响的机器人系统来说,都是一种自由度(1-DOF)控制结构,同时,为了获得理想的干扰衰减水平,必须增加控制器增益。 然而,实际上,对于机器人致动器,存在一
管道全位置焊接机器人机械系统研制pdf,管道全位置焊接机器人机械系统研制
基于避障工作空间的平面机器人机械臂的路径规划
在本文中,我们提出了一种视觉引导的机器人球束平衡控制系统,该系统由机器人操纵器(致动器),球束系统(工厂)和机器视觉系统(反馈)组成。 机器视觉系统以每秒50帧的速度反馈实时光束角和球位置数据。 根据
1.相机固定不动, 上往下看引导机器人移动 2.相机固定不动, 下往上看 3.相机固定在机器人上, 离旋转中心较近 4.相机固定在机器人上, 离旋转中心很远 5.特殊固定方式 – 分离轴
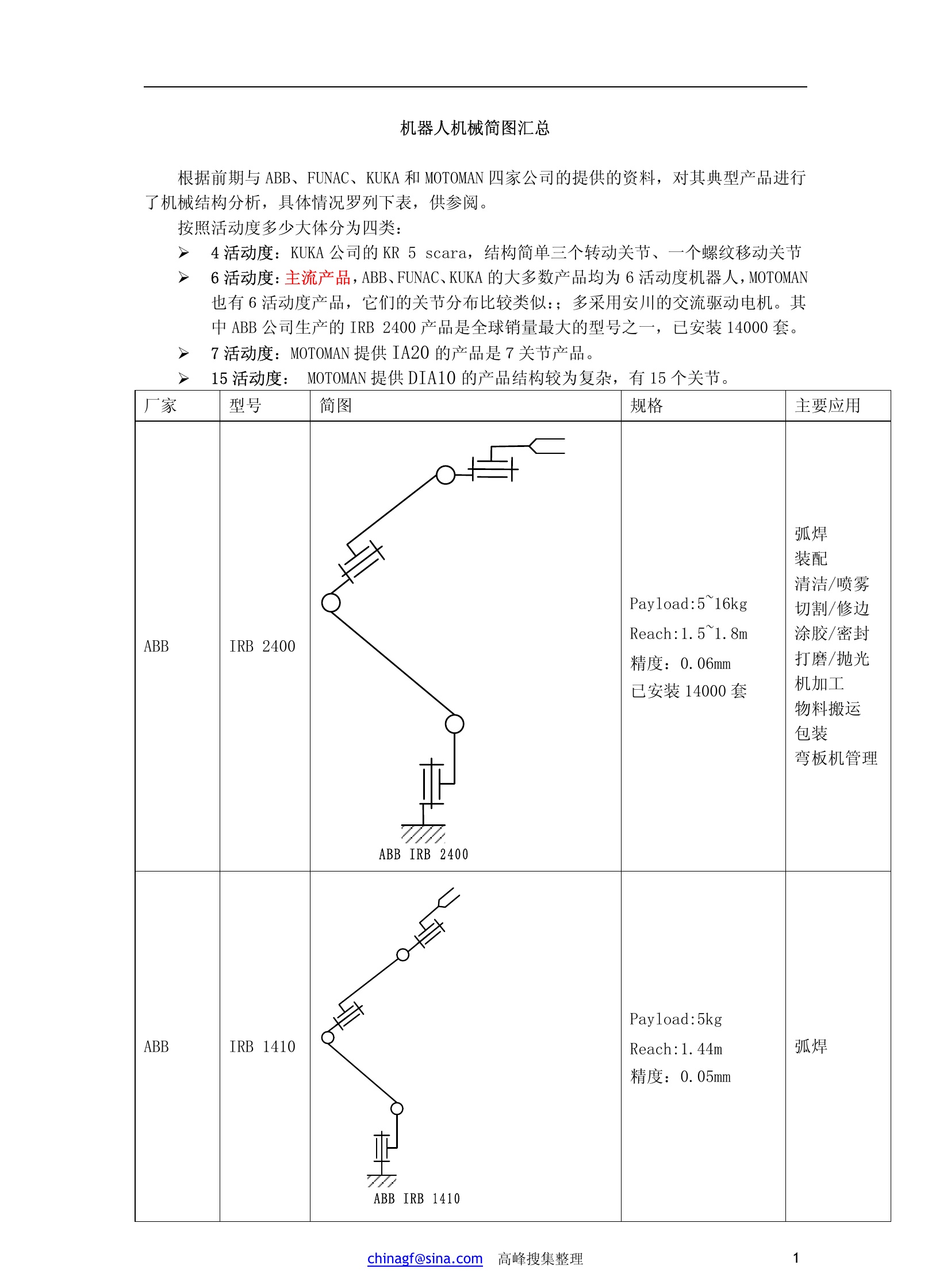
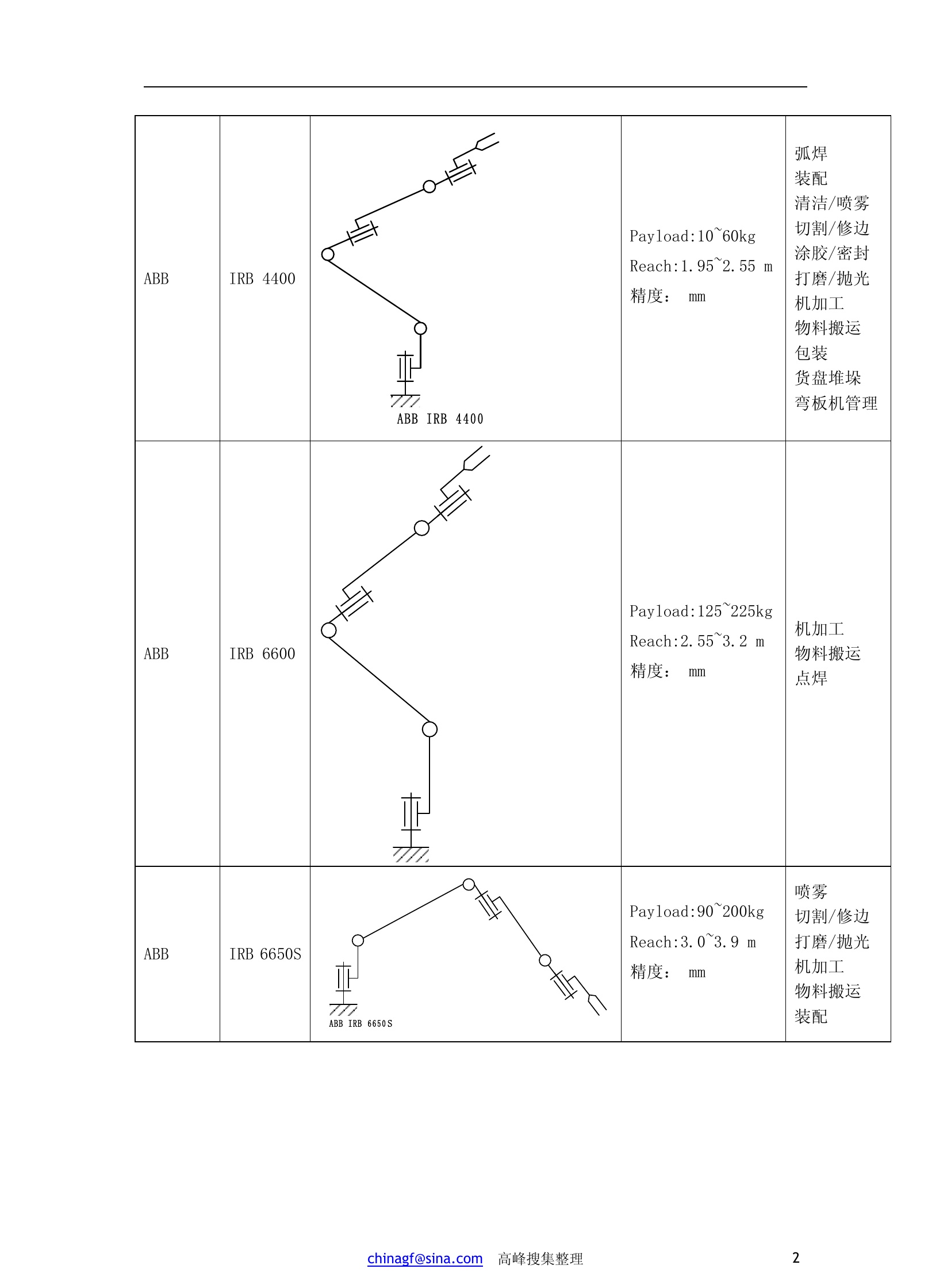
技术资料,关于机器人结构 拓扑 结构学,机器人结构理论
机器人结构原理,位置姿态计算方法,动力学和轨迹规划用超星打开
独眼巨人:多功能Discord机器人 Cyclops bot旨在提供许多功能,例如审核,服务器管理等等。 有用的链接 (尚未完成) 自托管 不建议您自行托管独眼巨人,除非您对独眼巨人的核心功能有深入的
暂无评论