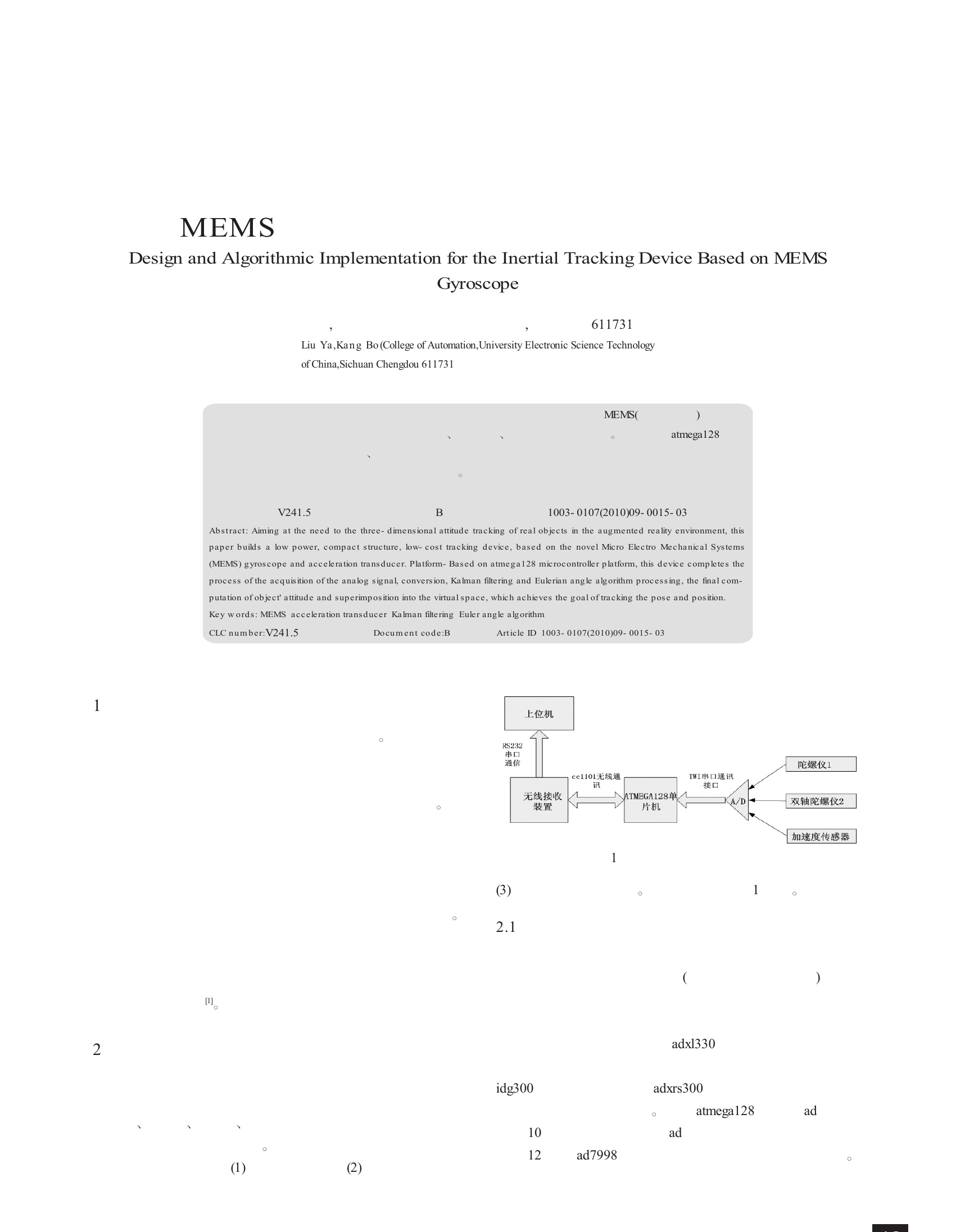
基于MEMS陀螺仪的惯性跟踪装置的设计及算法实现
暂无评论
unity陀螺仪GyroDroidGyroDroidGyroDroidGyroDroid
parallaxjs重力陀螺仪js视差引擎
支持MPLAB,使用的主芯片是PIC18F4520已经经过测试,可以通过串口助手查看,随时调用数据,方便快捷
mpu6050驱动1602显示基于avr................................................................................
陀螺仪6681AMPU-6881ProductSpecificationRevision1.0
提供基于STM32的DMP、卡尔曼、互补滤波代码以及文档。程序二次开发平台:兼容MDK4.7或MDK5.1测试单片机型号:STM32F103C8T6其中,DMP版本,会分别输出XYZ轴的角度。卡尔曼和
单自由度陀螺仪是自转轴具有一个进动自由度的陀螺仪,它以压电石英材料作为基底,用微机械加工(MEMS技术)的惯性敏感元件来测量旋转角速度。由于使用压电石英材料,简化敏感元件,因而随着工作时间和温度变化时
android陀螺仪测试,旋转android手机xyz值变化
根据手机移动大小加载图片,根据陀螺仪,限制具体的移动值。
什么叫陀螺仪?就是就是,重力感应的机子放桌子上左右转是木有效果的,但是陀螺仪就能感应到你在转他。 软件使用方法,拿着手机原地转圈儿。方块飞速旋转就证明你的陀螺仪是好的

暂无评论