暂无评论
信息融合技术在水下组合导航系统中的应用
针对井下车辆高精度惯性导航成本较高、低成本MEMS惯性传感器漂移较大等问题,提出一种井下多传感器组合导航系统,该系统通过蓝牙测距信息、MEMS惯性传感器及车载里程计信息进行组合导航。利用卡尔曼滤波技术
多传感器信息融合技术在智能驾驶系统中的应用 [日期:2004-12-8] 来源:电子技术应用 作者:赵敏华 安毅生 黄永宣 [字体:大 中 小] 摘要:介绍了当今国际上流行的几种智能驾驶系统,
基于多尺度的思想, 首先将在最细尺度上建立的状态方程、量测方程改写为以数据块形式描述的对应方程; 然后利用小波变换技术将最细尺度上的块状态向量向粗尺度上分解, 并将在最细尺度上建立的量测方程表达为粗尺
多传感器信息融合及其应用综述
采用分批估计理论和BP神经网络对井下多传感器信息进行两级融合的瓦斯监测系统设计方案能够大大提高数据测量的准确性、可靠性,并能实时、客观地给出矿井安全状况综合评价。利用多个煤矿的井下环境实测数据进行仿真
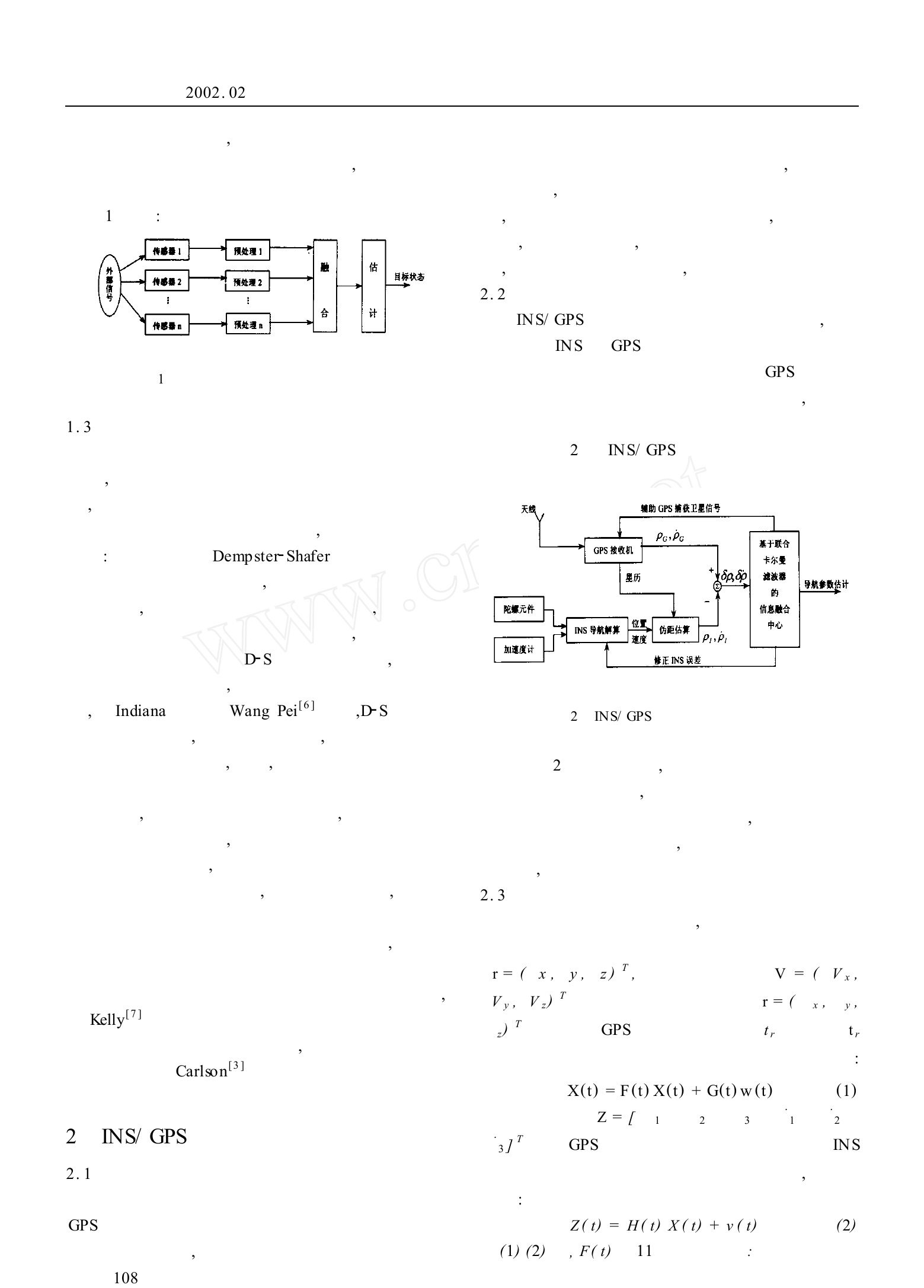
对GPS/SINS组合导航的工作原理和模型建立进行详细的分析,设置了两个传感器。提出一种基于信息融 合的导航参数最优估计滤波方法。通过计算机仿真说明该方法可提高导航系统的计算精度和速度,有较好的容错性
导读: 所谓多传感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用计算机技术将来自多传感器或多源的信
多传感器信息融合技术是一种利用多个传感器获取的数据进行融合,以提高系统性能的方法。其中,INS+DVL组合程序和imu+gps组合程序是常见的融合方案之一。INS(惯性导航系统)与DVL(底部数据链路
多传感器信息融合及应用多传感器信息融合多传感器信息融合及应用及应用多传感器信息融合及应用

暂无评论